
|
||

|
||
|
Honda歩行アシスト(以下歩行アシストと表記)という、文字通り「歩行を・アシスト」する製品もまた当連載で展開してきたパワープロダクツの仲間だ。「歩く」という移動の原点をサポートしたいと思うのはモビリティを追求するホンダからしてみれば究極の挑戦なのかもしれない。アシモへと至ったロボティクス研究の技術の一部が、このように結実した。
|
||
|
アシモなら知ってるが
「歩行アシスト」って、一体なんだろうか? が一般的なスタートラインだろう。2008年のプレスリリースには「ASIMOと同様、人の歩行研究の蓄積をべースに開発した〜」という一文がある。「二足歩行するホンダのアシモ」を知らない人は少ないだろうし、筆者は♫ シャララーンラン! ララララーンラン! と大好きなバンドが歌う曲にのってアシモが登場するCMが印象深く、もはや友達感覚というか、アシモには何とも言えない親近感すら抱いていた。色んなメーカーがロボットを作ってはいるものの、アシモほど身近に感じたモデルは思い当たらない。アシモはどんどん進化してダンスを踊りサッカーボールを蹴り、階段の上り下りはもちろん、駆け足もできるようになり、さらにはホンダ本社ではお茶まで持ってくるようになった……ということはこの「歩行アシスト」も、ものすごいんじゃないか、なんて想像が膨らむ。歩行アシストをつければ100メートル秒とか階段3段飛ばしとか!? |
||
|
「移動」の原点
ホンダは根本的には「モビリティ」の会社だ。モビリティとは「移動すること」。この連載で紹介しているパワープロダクツ群には移動しないものもあるし、「人の役に立つ」というもう一つのベクトルに比重がある製品も多いものの、ホンダの一つの基礎として「モビリティ」というキーワードがある。「移動すること」を考えると、大きいものではホンダジェットのような飛行機から、各種の四輪車はもちろん、我々が親しんでいるバイクがあって、それのコンパクトで最もスタンダードなものがスーパーカブということで間違いないだろう。パワープロダクツでは、第2回で紹介した汎用エンジンを使ったロングテールボートや、第4回で取材した船外機などもモビリティツールの大切な動力源として活躍している。 |
||
  |
|
 |
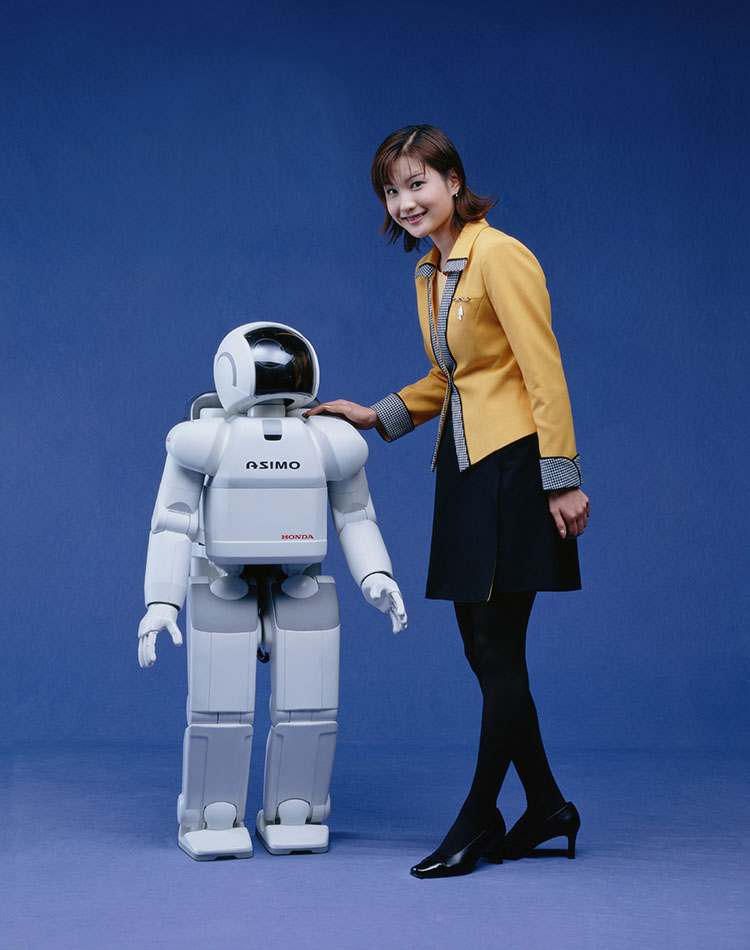
| 2000年に発表されたアシモは誰もが知るホンダのロボット。人間に近い自立歩行ロボットのひとつの完成形で、開発は1986年に始まった。1996年にアシモの前身であるP2(写真右) が公開された頃、歩行アシストのプロジェクトはスタートした。 | ||
|
仕組みはシンプル
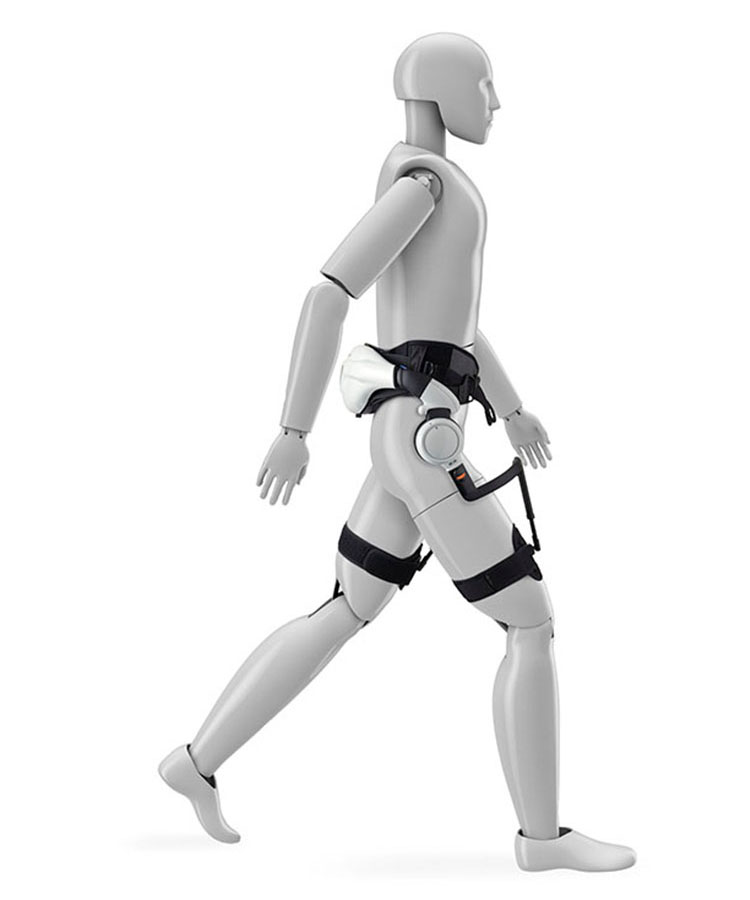
本体をウエストポーチのように腰に巻き、左右の太腿の下の方、膝に近いところにアームを固定。そのアームに電動アシスト自転車のように前後方向のアシストが加わり、腿を装着者の意図に合わせて前や後ろに動かすアシストをしてくれる、というのが簡単な仕組みだ。装着している人が今どのような姿勢をしていて、足を前に出すタイミングなのか、どの程度のアシストが必要なのか、そういった細かな制御はもちろんあり、細かく設定できるのだが、仕組みそのものはいたってシンプル、あくまで腿の前後運動の補助であり、製品名そのまま、「歩行の・アシスト」をするものだった。 |
||
 |
|
 |
|
|
歩行アシストはウエストポーチのように腰に巻いて装着する本体の両側に小型のモーターがあり、そこから延びるアームを膝の上で固定し、タブレットでセッティングするという、見た目にもわかりやすい構造で取りつきやすい。
|
|
医療や福祉の現場で活躍
僕もアシモになれる! というイメージから離れられないでいる筆者に対して冷静に説明して下さったのは、新事業推進部 ロボティクス事業課の稲田豊主任と、浜谷一司課長。お二人とも車やバイクといったいかにもホンダ! の空気感は少なく、特に浜谷さんはホンダ入社後ロボット一筋の専門家。お二人によると今この歩行アシストが活躍しているのは、医療の現場やデイサービス/デイケア施設等だという。施設内では手すりやスロープが充実しているはずで、そこでこの機械による歩行アシストが必要なのだろうか。 |
||
 |
|
 |
|
ライフクリエーション事業本部 新事業推進部 ロボティクス事業課 課長 浜谷一司さん
畑違いともいえるガス器具の会社から「何か新しいことをしたくて」と転職し、1997年ホンダに入社。以後基礎技術研究所において、初期のユニカブの開発など一貫してロボットの研究開発に携わる。2012年から歩行アシストの担当に。ホンダ入社後に二輪免許を取得し、VTR250 に乗っていたが、今春からはレブル500を購入して通勤している。 |
|
ライフクリエーション事業本部 新事業推進部 ロボティクス事業課 主任 稲田 豊さん
18歳でホンダに入社して今年28年目という、叩き上げのホンダマン。入社後は製作所で5年、その後営業へ異動し大阪で9年勤務。アシモが登場した2000年頃「これを売りたい!」と思い、以後5年間その思いを持ち続けたところ、基礎技術研究 所から「いっしょに売ろう」と声がかかり現在の部署で歩行アシストの営業部門を担当。バイクには今は乗っていないが、かつてはフォルツァに乗っていたそうだ。 |
|
|
||
 |
|
 |
 |
|
 |
| 病院だけではなく、高齢者施設やデイサービスなどリハビリを行う現場などですでに 300台以上が稼働している。自分では分かり難い部分を数値やグラフで簡単に確認できることは、効率のアップだけではなく本人のやる気の向上にも大きく影響するという。 | ||
|
データ収集の重要性
データ収集と聞くとなんだか地味なイメージもあるかもしれない。しかし何事もデータは大切であり、歩行アシストの装着と短時間の計測だけで即座に割り出した筆者の歩行パターンやクセには驚かされ、リハビリの現場で重宝されることは容易に想像できる。同時に連想したのは「セッティング」だった。 |
||

タブレットはアシスト具合を細かく設定できるだけではなく、各種データを記録することが出来る。写真のように動画と連動して左右の足の動きをデータ化することも出来る。
|
|
モトGPのような究極のレースではもちろん、草レースや、もしくは個人でサーキットのスポーツ走行を楽しんでいるだけの人でさえ今は詳細なデータ取りができるようになっている。GPSを搭載し、タイムだけでなくどのようなラインを通っているのか、それぞれの区間でのタイムやクセ、加速や減速のタイミング、最高速などが可視化されていることをご存知の読者も多いだろう。加えてさら に突き詰めるとサスペンションのストロークやアクセル開度など、ありとあらゆる操作や動きをモニタリングし、そういった膨大な情報量からより速く走ることを追求していく。情報量が多ければ多いほど突き詰めていけるし、走行するたびにデータを収集すれば過去のものと照らし合わせていくこともできる。 |
|
サーキット走行は(一部の人を除いて)遊びでしかないが、リハビリの現場はなるべく早く・効率的に結果へと結び付けていくことが大切だ。よって(特に筆者のようにパワースーツ的なアクティブな想像をしていた人にとっては) すこし地味に感じるかもしれないが、「歩行アシスト」は、モビリティの基本を実行できるように縁の下の力持ち的に、確実に活躍しているのだ。 |
||
|
ここまでとここから
歩行アシスト、という製品がある事はぼんやりとわかっていても、実物を見ると、「あれ? 最初 からこんな感じじゃなかった? 何が進化しているんだろう」と感じるかと思う。 |
||
 |
|
 |
| 基本的な形が出来た2006年頃のモデル(写真左)と改良された2012年頃のモデル。最新モデルでは装具が大きく進化していることが解る。一般的には目にすることは少ないが、確実に進化を続けている。 | ||
|
活躍の場
リハビリの現場や病院などで使われ、今現在おおよそ300機が稼働しているというから見たことがある人もいるかもしれない。 |
||
|
この研修には医師や理学療法士(リハビリ専門職)の他にも、デイサービス職員などが参加。歩行アシストは医療器機ではなく使用する際に特別な資格が必要ないため、リハビリに関連する幅広い方々が参加しているのだ。リハビリの現場をよりスムーズに、効率的に進めていくための機器ではあるが、操作する人を限定しないことも魅力のひとつだろう。 |
|
 |
|
|
歩行アシストは2015年、生活支援ロボットの国際安全規格であるISO13482の認証を取得。2018年には欧州と米国で医療器機の承認を取得するなど着実に活躍するフィールドが広がっている。
|
|
|
「ちょうど今、最初のリース契約の更新時期にきているところですが、皆さん更新して下さっています。現場によって使われ方は多様ですが悪く言われることはないので、お役に立てているようですね。歩行アシストを装着してリハビリをする人にとっては、スタッフに付き添ってもらわなくてもメニューを進められるわけですから、自主練を促してくれるようなところもあります。これはモチベーションの維持にも繋がっているとフィードバックを頂いています」 |
||
 |
||
|
ホンダの神通力
アシモになれるだとか、パワースーツ的な機能をもたせて遊園地でヒーローになるだとか、そんなアクティブで不真面目(?)なテンションで臨んでしまった取材だったが、その実は極めて真面目に人間のモビリティの原点を支える活躍をしていた「歩行アシスト」。中には「機械に頼るなんて……」という関係者や利用者もいるというが、実際に使ってみればその有効性に気づいてもらえることが多いそう。効率的でリーズナブルなこの器機を使うことで元気に歩ける状態へと早期に復帰できるのならば、こういった便利な機器は利用しない手はないだろう。 |
||
|
姿勢の維持に感動 歩行アシスト・インプレッション
当連載で初めて実際に製品を装着・操作する機会となったこの取材。装着そのものは難しくなく、長身・細身という規格外体型の筆者でも装着している時の違和感はなかった。フィット感は高く、本体は腰のあたりにあるため重量も気にならない。 |

[第7回 商品企画部 部長 松澤 聡さん|第8回|]
■新着記事
- 2023年11月13日
- HONDA編
- スーパーカブ大全・「不動の思想、進化する思考」スーパーカブ全史・9 2007〜
- 2019年10月25日
- 旅日記
- 山椒は小粒でピリリと辛い 2020年も縁(=猿)起がいい!? ホンダモンキー125 渋温泉&地獄谷野猿公苑ツーリング パート3:ツーリング2日目(長野→山梨→神奈川→東京ルート)
- 2019年10月16日
- MBニュース“情報眼”
- 中上、来シーズンもMotoGPクラス参戦へ
- 2019年10月16日
- MBニュース“情報眼”
- KADOYAが「レザーフェア」を開催、「秋冬総合カタログ」も無料送付中!
- 2019年10月16日
- 新車・試乗
- SUZUKI KATANA試乗 『否定から肯定、そして理解へ そんな恋があったっていい ~あるカタナ乗りの個人的過ぎる想いについて?』
- 2019年10月15日
- 新車プロファイル2019
- 3月に国内発売が開始されたばかりのNinja ZX-10R KRT EDITIONがカラー変更
- 2019年10月15日
- 新車プロファイル2019
- 新型Ninja ZX-6R KRT EDITIONがカラー&グラフィックを変更
- 2019年10月15日
- 新車プロファイル2019
- 国内でも発売開始した新型Ninja ZX-6Rがカラー変更
- 2019年10月14日
- Mr.Bike BG
- ミスター・バイクBG 2019年11月号発売中!
- 2019年10月14日
- 企画・読み物
- 知っているようで実は知らないもうひとつのホンダ Power Product Quest 第9回 製品編2 初めてづくしの蓄電機 Lib-AID E500 小さなE500が秘めた大きな可能性
- 2019年10月11日
- MBニュース“情報眼”
- “至極の高性能”を誇る新型TRIUMPH Street Triole RSを発表
- 2019年10月11日
- MBニュース“情報眼”
- カワサキが「第46回東京モーターショー2019」の出展概要を発表
- 2019年10月11日
- 新車プロファイル2020
- YZF-R6のサーキット走行専用車を予約期間限定販売
- 2019年10月11日
- MBニュース“情報眼”
- 最も軽量でコンパクトなベスパ、LX125 i-getの装備を充実させてアップデート
- 2019年10月11日
- レース
- パオロ・イアニエリのインタビューシリーズ第11弾 レプソル・ホンダ・チームのマネージャー、アルベルト・プーチに再び訊いた マルケスというライダー、ロレンソ引退の噂などなど……
- 2019年10月10日
- 新車プロファイル2019
- レース専用モデル Ninja ZX-6Rを受注販売
- 2019年10月10日
- MBニュース“情報眼”
- YAMAHAが「第46回東京モーターショー2019」に出展するブースの概要を発表。
- 2019年10月10日
- D-2 幻立喰・ソ
- 幻立喰・ソ 第108回「なので室蘭」
- 2019年10月09日
- MBニュース“情報眼”
- ショップオープン情報「アップガレージ奈良四条店」「アップガレージ群馬伊勢崎店」
- 2019年10月09日
- MBニュース“情報眼”
- ショップオープン情報「ハーレーダビッドソン高知」